

电动汽车
相比目前还无法大规模应用的无人驾驶,高级辅助驾驶系统是一种把汽车变的更智能的实用技术。目前的车辆都带有驾驶辅助系统,大范围的应用的倒车雷达,比较高端的远程召唤,都属于辅助驾驶。
随着造车新势力的崛起,网络公司的介入,慢慢的变多的高科技技术应用到了汽车上。ADAS作为汽车智能化的典型功能,备受关注。
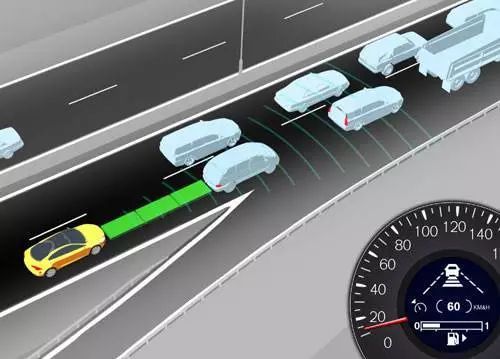
自适应巡航控制管理系统是一种智能化的自动控制管理系统,它是在早已存在的巡航控制技术的基础上发展而来的。
ACC的原理并不复杂。首先设置一个跟车距离,随后通过长距离毫米波雷达实时监测前方的汽车,通过对发动机和制动器的控制,使前车与自车始终保持在设定的距离。这样驾驶员就可以解放双脚。
自动巡航就是自动油门,你设定个速度你就不用踩油门了,自动巡航给你踩油门,而自适应巡航是在自动油门上再给你来个自动刹车,刹车你也不用管了,该减速的时候它帮你减速,该刹车的时候它帮你刹车。

随着消费者开始注重汽车的安全性,也让车商们开始导入各种不同的安全配备,从最初的ABS( 防抱死制动系统)一路升级至ESC(车身电子稳定性控制系统),再到AEB等各种不一样的等级的配备。
AEB系统即是紧急刹车系统利用雷达侦测和前车的距离,并经由ECU做出分析,根据不同的距离和速度做出警报,如果做出警报显示后驾驶者并不任何反应,当安全距离小于范围内AEB系统就会启动,自动介入汽车的刹车系统,借此降低和前车车辆/人物的碰撞机率。
AFS功能解决高速公路,乡村公路已经转弯道路的照明效果,可以有效提升照明的范围,保证安全可视范围,提升行车安全。
ADB功能主要是针对车辆在跟车和会车时,由于远光照射导致对方车辆驾驶员炫目的问题。
智能大灯控制管理系统模块需要采集的信号包括车速信号、雷达测距信号、光线传感信号或前摄像头信号灯。通过算法计算得出,周围车辆的状态包括车辆灯光开启状态、车辆行驶车速、车辆行驶方向等。ADB功能输出控制信号给执行机构,调整光型使照射前方车辆的光束自动关闭,避免了炫目的问题。
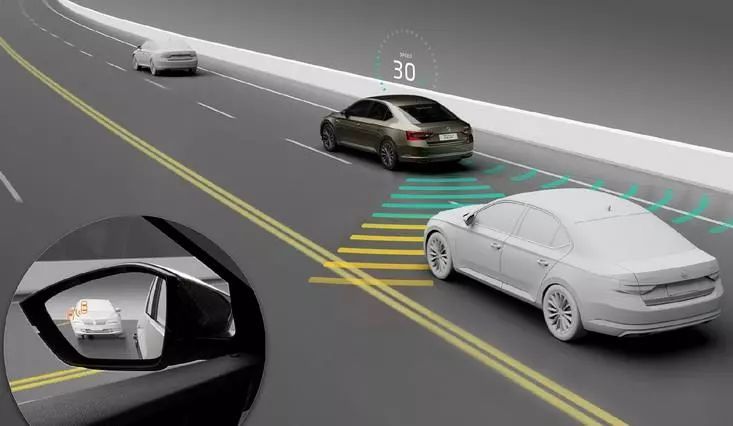
盲点检测系统,通过车辆四周排布的防撞雷达、多普勒雷达、红外雷达等传感器、盲点探测器等设施。用于监测自车后侧方盲区内其他汽车的系统,用以提醒驾驶员后侧方存在碰撞风险,请勿变道。该功能的实现依赖于后侧向毫米波雷达对障碍物的检验测试能力,并以此为根据对司机进行预警。也用于侧向辅助。

系统运用感应器来检测驾驶员的注意力。如果司机看向马路前方,并且在此同时有危机的情况被检测到了。系统就会用闪光,刺耳的声音来警示。如果司机没做出任何回应,那么车辆就会自动刹车。

FCW 可以通过雷达系统和摄像头来时刻监测前方车辆,判断本车于前车之间的距离、方位及相对速度,当存在潜在碰撞危险时对驾驶者进行警告。FCW 系统本身不会采取任何制动措施去避免碰撞或控制车辆。

该技术把汽车行驶过程中仪表显示的重要信息(如车速)投射到前风挡玻璃上,不仅仅可以帮助对速度判断缺乏经验的新手控制自己的车速,避免在许多的限速路段中因超速而违章,更重要的是它能够使驾驶员在大视野不转移的条件下瞬间读数,始终头脑清醒地保持最佳观察状态。

智能车速控制管理系统。该系统能识别交通标识,并根据读取的最高限速信息控制油门,确保驾驶者在法定限速内行驶,有很大成效避免驾驶者在无意识情况下的超速行为。
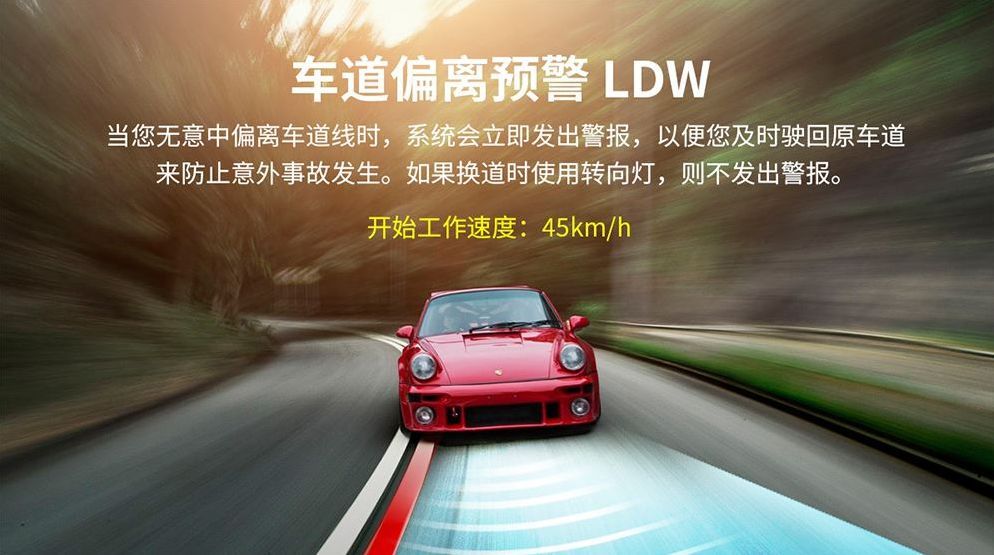
车道偏离预警系统主要由 HUD 抬头显示器、摄像头、控制器以及传感器组成。LDW仅提供预警功能,汽车回到车道内行驶需要驾驶员手动控制方向盘。在预警的基础上,LDW可以升级到更高级的车道保持辅助系统(Lane Keep Assist,简称LKA),在驾驶员未对警告信息做处理的情况下,汽车自动回正方向盘,保持车辆在本车道内行驶。如果真要换道怎么办?那就请先打开转向灯。

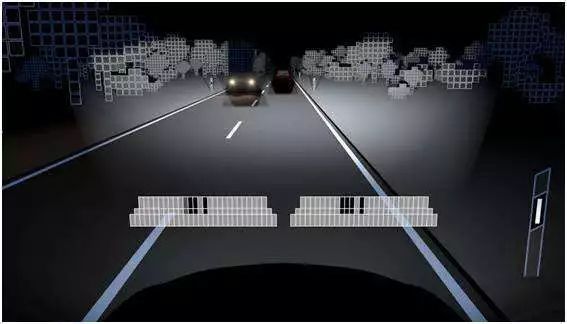
汽车夜视系统,利用红外线技术能将黑暗变得如同白昼,使驾驶员在黑夜里看得更远更清楚。夜视系统的结构由 2 部分所组成:一部分是红外线摄像机,另一部分是挡风玻璃上的光显示系统。
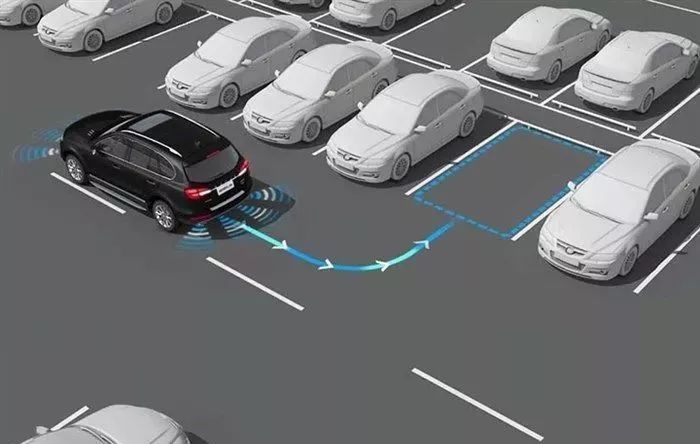
泊车辅助系统通过安装在车身上的摄像头,超声波传感器,以及红外传感器,探测停车位置,绘制停车地图。自动泊车(Automatic Parking Asistance,简称APA)是很多新手司机最爱的ADAS功能之一。汽车缓缓驶过库位时,汽车侧方的超声波雷达可以探测到侧方是不是真的存在一个空闲的空间,使得汽车能够泊入其中。
车辆行驶途中可通过摄像头雷达,和激光雷达来探测到四面行人,在安全距离内及时控速。
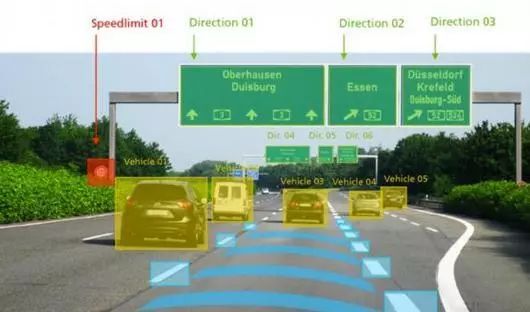
这个技术让车辆能自动识别交通信号或者标志牌,比如说最高限速,或者停车等标示。

全景泊车停车辅助系统由安装在车身前后左右的四个超广角鱼眼摄像头,同时采集车辆四周的影像,经过图像处理单元畸变还原→视角转化→图像拼接→图像增强,最终形成一幅车辆四周无缝隙的 360 度全景俯视图。在显示全景图的同时,也可以显示任何一方的单视图,并配合标尺线准确地定位障碍物的位置和距离。

通过Smart Summon,汽车将在更复杂的环境和停车位中进行导航,根据自身的需求在物体周围做相关操作,以便找到您。
当你回到家,离开你的Model SModel X时,就能够正常的使用“召唤”功能让它完成剩余工作:打开车库门、进入车库、泊车、熄火。早上醒来要用车的时候,使用“召唤”功能,它就会打开车库门,开到指定地点等候。更广泛地说,“召唤”使你免除在狭窄的泊车点挤进挤出的麻烦。该功能目前仍在测试阶段,最终,“召唤”将使你的汽车能在全国任意地方赶来与你会合,并且与你的日程同步,从而知道到达的精确时间,实现无缝对接。
高级辅助驾驶功能被视为无人驾驶之前提。利用安装于车上的传感器,ADAS可在第一时间收集车内外的环境数据,进行静、动态物体的辨识、侦测与追踪等技术处理。
以上内容转载自智车科技,目的是传播更多详细的信息,如有侵仅请联系#替换成@)删除,转载内容并不意味着第一电动网()立场。

